Article: Meet OAP — an open robot reference design project
Nov 5, 2003 — by LinuxDevices Staff — from the LinuxDevices Archive — 17 views“Have you ever dreamed of building your own Linux-based droid [that could] roam around your home autonomously, intelligently obeying your commands?” asks Dafydd Walters. “You may now be able to finally fulfill your dream.” Walters founded and leads the Open Automaton Project (OAP), which aims to help enthusiasts assemble an intelligent mobile robot with stereo vision and state-of-the-art PC mainboard… technology — for about the cost of a good PC.
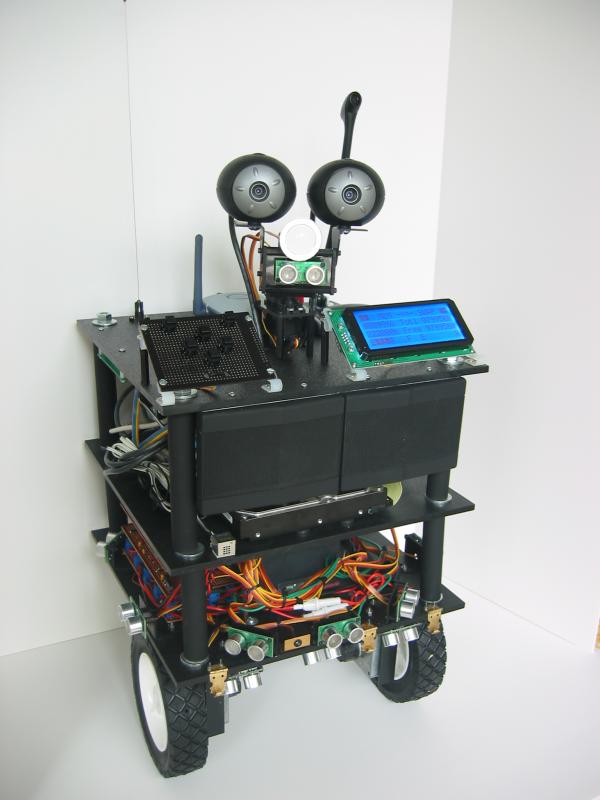
OAP reference design
(Click for larger view)
Unlike the RETF and OROCOS projects, which focus on devising open standards for robot hardware-software interfaces, OAP is all about implementation. OAP's objective is to create a reference design that bridges the gap between sophisticated robots used by researchers and the “small, rug-roving” critters typically assembled by hobbyists.
OAP's SourceForge-hosted Website provides circuit schematics, source code, and documentation for free download under an Open Source license, “to enable robotics enthusiasts to assemble their own intelligent mobile robot,” says Walters.
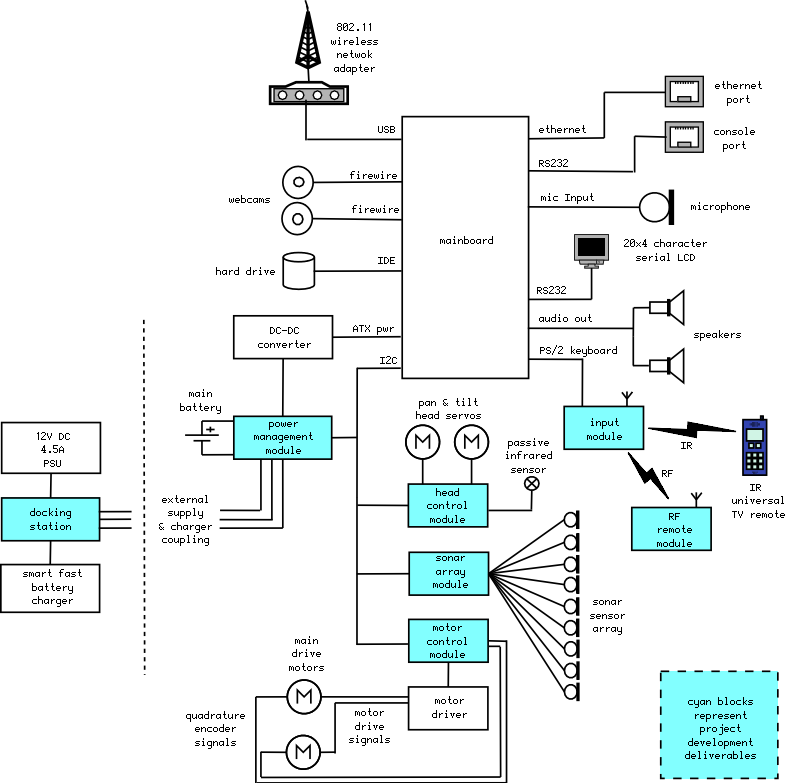
OAP reference diagram
(Click for larger view)
Specific project goals include:
- Design a coherent set of modular components (hardware and software) that conform to standards (where possible)
- Minimize cost to $1,500 – $2,000, about the cost of a good PC
- Develop a low-cost real-time vision system for use as the primary spatial sensor
“To keep the project within the financial reach of hobbyists, costs are minimized by using readily available “off-the-shelf” consumer-grade hardware components where possible, and designing custom electronic subsystems where ready-made components are either not readily available or are too expensive,” notes Walters. “For example, the vision system consists of readily available consumer FireWire webcams mounted on a Pan and Tilt head made using a pair of standard radio-control hobby servos.”
According to Walters, the advent of consumer-grade webcams and motherboards supporting FireWire should make low-cost stereo vision possible. The project chose the ADS Pyro 1394 WebCam, but any IIDC-compliant (a.k.a. DCAM) digital camera should work.
Twelve sonar detectors (Devantech SRF04s) controlled by the oap-sonar commandline utility augment OAP's vision. One unit pans and swivels with OAP's eyes, while eight face outward around the circumference of the base to detect obstacles. Three downward-facing detectors listen for precipices.
An infrared sensor mounted on OAP's panning and swiveling head and “tuned to the human body's infrared emissivity” helps OAP identify humans.
OAP pans and tilts its head through an I2C interface controlled by the oap-head command line utility. Two main DC drive motors provide mobility through the oap-motor program. Wheel encoders capture odometry. A power management module monitors battery levels and can communicate via infrared with OAP's fixed docking/recharging station.
OAP's human robot interface (HRI) includes:
- Speech output
- Minimalist robot-mounted LCD and keypad
- Wireless and infrared remote controls
Speech recognition/input will not be attempted, initially, according to Walters.


OAP's IR and sonar sensors, and wireless network adapter
A prototype droid built by Walters to prove the design (pictured at top) was on display at the Seattle Robotics Society 2003 Robothon in Seattle, Wash., where it picked up the Judges' Choice award. Walters claims to have built the prototype droid for less than $2,000, and provides a bill of materials on the OAP Website.
A 1GHz EPIA M 10000 mainboard from VIA lies at the heart, if not the brain, of the prototype. VIA's Mini-ITX form-factor boards have proven popular in robotics circles, and were used in the Linux-based Centibots that were on display at LinuxWorld 2003, as well as in the VIA-RoboteQ robot.
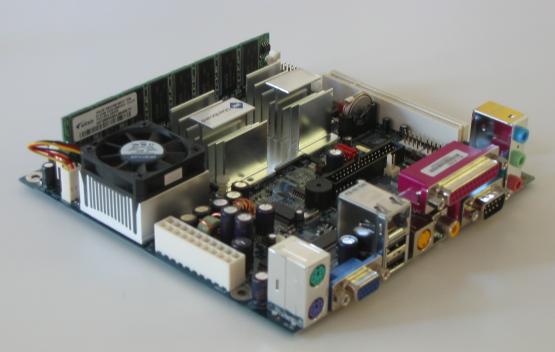

OAP's VIA EPIA M mainboard
(Click either image for larger view)
Other interesting hardware components, besides those mentioned above, include:
- 12V 13 amp-hour sealed lead acid battery
- DC-DC converter
- Rex-12 square robot base with HP Quadrature encoders
- 512MB PC2100 DDR DIMM
- Crystalfontz 634 intelligent serial display
- Belkin F5D6050 Wireless 802.11b USB NIC
- Magnevation Motor Driver Kit based on two LMD18200 H-Bridges
- Power-Sonic PSC-124000A battery charger (4 amp)
In terms of software, Walters notes that “existing Open Source projects are leveraged as much as possible to take advantage of research and development work that's already been done in the field of robotics.” Such packages include the Festival Speech Synthesis System, Coriander firewire-based camera control software, and libdc1394 DC control library.
To find out more about the Open Automaton Project, or to join a discussion mailing list, visit the project homepage.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.