Isamu: a humanoid robot with a Pentium + RTLinux brain
Jul 20, 2001 — by Rick Lehrbaum — from the LinuxDevices Archive — 4 viewsMeet Isamu, the humanoid robot
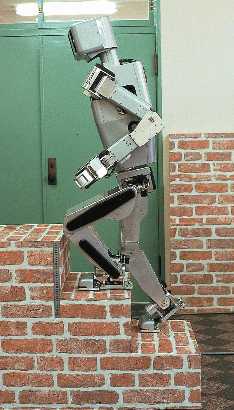
Isamu stands 53 inches tall, weighs 121 pounds, and walks at over one mile per hour. Not only that, Isamu climbs up and down stairs, carries 4-pound objects in its hand-like grippers, and even recognizes human faces via its dual-camera stereo vision system.
Oh, and Isamu has a “brain” that consists of a dual-Pentium computer running RTLinux.
Where did Isamu come from?

The purpose of the project is to develop test-beds for research into a wide range of applications for “human interactive motion control technology”. For example, Kawada Industries intends to use Isamu as a platform to explore potential commercial applications in markets like construction systems, disaster relief, aids for the handicapped, rehabilitation and training devices, and amusement.

In an effort to mimic a degree of human-like movement, Isamu is endowed with thirty-two degrees of freedom — six for each leg, one for each foot (“toe” joint), seven for each arm, one for each gripper, two for the neck, and three for the eyes.
The onboard computer, equipped with dual 750MHz PentiumIII processors running RTLinux, provides real-time servo and balance compensation, and coordinates the robot's 3D vision and motion-planning software modules.
Isamu's bipedal walk control system software was developed by the Inoue-Inaba Laboratory, while the hardware and robotics structures, including the servo-based level control system, were developed by Kawada Industries. Kawada applied aircraft technologies to the body frame, resulting in a strong and light structure.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.