Linux-based FROG-I robot thinks its a dinosaur
Apr 21, 2011 — by Eric Brown — from the LinuxDevices Archive — 4 viewsThe Chinese Academy of Sciences demonstrated a quadruped robot intended to test gait control and locomotion — and eventually mimic the movement of a triceratops. The flexibly jointed, 3.1-foot FROG-I robot runs Linux on an Intel Xscale PXA270 processor, communicating via Wi-Fi with a host computer, while lower-level functions are controlled by two Texas Instruments DSPs.
FROG-I (Four-legged Robot for Optimal Gaits) was developed by Dr. Wei Wang and a team of researchers at the Chinese Academy of Sciences, in Beijing, working out of the Institute of Automation's Field Robotics Group. The robot is intended as a research platform for studying gait control, gait transition, and other locomotion algorithms.

FROG-I prototype, with power tether trailing
 FROG-I is intended as prototype for a robot that will mimic the living endoskeleton of a triceratops, according to a story in IEEE Spectrum. Wang received a desk model of the horned dinosaur (pictured at left) from a film director, who hopes to use FROG-I's triceratops descendant in a dinosaur movie. Meanwhile, Wang told the publication, "I hope it can find entertainment applications in dinosaur museums or expos."
FROG-I is intended as prototype for a robot that will mimic the living endoskeleton of a triceratops, according to a story in IEEE Spectrum. Wang received a desk model of the horned dinosaur (pictured at left) from a film director, who hopes to use FROG-I's triceratops descendant in a dinosaur movie. Meanwhile, Wang told the publication, "I hope it can find entertainment applications in dinosaur museums or expos."
At first glance, FROG-I seems to be a cousin of Boston Dynamics' Big Dog, another ambulatory quadruped robot. However, as seen in the video, while FROG-I is capable of stepping over obstacles, it is a much slower moving beastie, lacking Big Dog's hydraulics or ability to hump heavy loads.
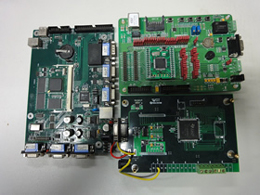
FROG-I's PXA-270 driven controller board
 The DSPs are said to control the robot's pan tilt camera and actuated joints, while also processing signals from various sensors. These include joint angle, foot contact, ultrasonic, axis acceleration, and gyro sensors.
The DSPs are said to control the robot's pan tilt camera and actuated joints, while also processing signals from various sensors. These include joint angle, foot contact, ultrasonic, axis acceleration, and gyro sensors.
Measuring about 3.8 feet long by 3.1 feet tall by 2.3 feet wide (1150 x 950 x 700mm to be precise), FROG-I weighs in at 121 pounds (55 kilos). Each leg contains one hip pitch joint and one knee pitch joint, each of which is powered by DC motors, says the project.
FROG-I also sports a passive compliant prismatic DOF (degrees of freedom) controller at each toe. The robot is currently powered by a tethered DC48V 18A power supply.
FROG-I is further equipped with various specialized software controllers including central pattern generator (CPG), gait transition, inverse dynamics control, geology adaptation locomotion, and trajectory planning components. A key research goal is to develop trajectory planning and control techniques to allow jumping over obstacles and crossing ditches, says the project.
FROG-I's first steps, on YouTube
Source: IEEE Spectrum
(Click to play)
Availability
More information on FROG-I may be found at the Chinese Academy of Sciences Institute of Automation FROG-I website. The IEEE Spectrum story may be found here.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.