Linux drives spiffy mobile robot test-bed
Feb 7, 2003 — by LinuxDevices Staff — from the LinuxDevices Archive — 7 viewsThe ENST Computer Science Department (Paris, France) has developed a low cost, customizable, Linux-powered mobile robot test-bed for embedded real-time application experimentation. The Spif autonomous robot boots Linux 2.4.19 from Flash, DiskOnKey, and 802.11 wireless. The hardware board structure and size have been designed to make it easy to add new sensors and actuators, allowing powerful customization… and limitless experimentation.
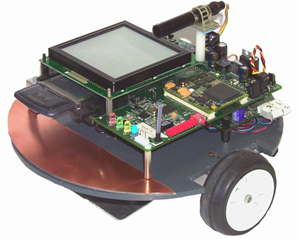
The basic hardware platform of this test-bed is a small (15 x 15 cm) electronic circuit board which has an open, modular architecture. The CPU is based on a DENX MPC860-50 processor daughter module with 64 MB SDRAM and 8MB Flash memory. The board offers standard wireless communications: Ethernet, 802.11, and Bluetooth; and also provides a wide range of input/output interfaces including USB, I2C, PCMCIA, 115kbps IRDA, ISO 7816-2 Smartcard, 8-bit audio CODEC, and a graphical LCD touchscreen interface.
The Spif robot is a good example of this customization ability: motors, wheels, telemeters, whiskers, bumpers have been added to the basic board. The monitored Nimh battery provides 1.5 hours of autonomy.
When the battery's level is low, the robot moves towards a refueling intelligent dock, based on the same basic electronics. The robot finds its way to the dock using a laser beam, sent by the dock on the robot's request.
More details on the Spif project are here.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.