Robotics tools add Linux support
Sep 19, 2008 — by Eric Brown — from the LinuxDevices Archive — 4 views Energid Technologies Corp. announced an upgrade to its robotics software platform that adds fast validation features and Linux support. Actin 2.0 is aimed at developers of advanced industrial, defense, and planetary exploration robots, “including those with 100 or more degrees of freedom,” says the company.
Energid Technologies Corp. announced an upgrade to its robotics software platform that adds fast validation features and Linux support. Actin 2.0 is aimed at developers of advanced industrial, defense, and planetary exploration robots, “including those with 100 or more degrees of freedom,” says the company.
(Click for larger view of an unspecified NASA/JPL rover designed with Actin)
As indicated in our recent Robot software shootout, most major robotics development frameworks support Linux. Now, Energid has joined the party, with both components of Actin — the Actin C++ toolkit and the Actin 3D viewer — working across both Linux and Windows.
“We had customers demanding Linux,” stated Chuck Seberino, director of Visualization for Energid. “We got the message.”
Energid's customers are said to include commercial robotics companies, transportation companies, manufacturers, the U.S. Department of Defense, and multiple NASA centers, including the Jet Propulsion Laboratory (JPL), which uses Actin to control planetary exploration robots (see image at top and below). Some of Actin's core technology also originated from NASA, says the company.

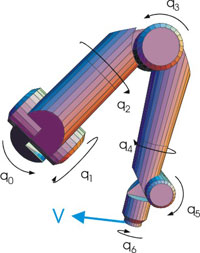
On the left, another Actin-developed NASA rover; on the right, a diagram showing
parameters for velocity control on an Actin-controlled “RRC K-1207i manipulator.”
Actin 2.0 offers some of the following capabilities, says Energid:
- Provides tools for geometric reasoning
- Supports cooperation of multiple robotic manipulators
- Can dynamically simulate physical environments
- Supports three-dimensional rendering
- Provides basic tools for machine vision
- Can be used for network TCP/IP communications
With the toolkit's new fast validation capability, roboticists can now use a CAD model to “create a powerful control system and immediately test it in simulation,” says Energid. The software supports fixed and mobile robots with any number of moving parts and almost any type of articulation, claims the company. Other touted features include strength optimization, accuracy enhancements, reductions in joint torque, hardware error recovery, and avoidance of joint limits and collisions.
Actin's actuator models are exchangeable, and are said to include friction, flexibility, power consumption, and torque and speed limits. The toolkit's impact dynamics are said to use multiple contact models, configurable surface properties, and impact detection and response.
Stated James Bacon, principal engineer at Energid, “Our customers wanted fast validation after a design change in CAD software. You can now change link lengths and sensor positions on a robot and simulate and test it with a control system in seconds instead of what used to take days.”
Availability
Energid did not provide specifics about the availability or pricing of Actin 2.0 for Linux. More information may be found here.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.