Linux robot plays frenetic clarinet
Jun 20, 2008 — by Eric Brown — from the LinuxDevices Archive — 36 views [Updated: Jun. 23, 2008] — Australian research group NICTA and the University of New South Wales (UNSW) have developed a clarinet-playing robot that runs Linux. The “Robo-Clarinet” won first prize at the Artemis Music Orchestra competition for autonomous, embedded musical instrument performances.
[Updated: Jun. 23, 2008] — Australian research group NICTA and the University of New South Wales (UNSW) have developed a clarinet-playing robot that runs Linux. The “Robo-Clarinet” won first prize at the Artemis Music Orchestra competition for autonomous, embedded musical instrument performances.
(Click for larger view of Robo-Clarinet )
digg this story |
Staged in Athens, Greece, by the Artemisia Association, the Artemis Music Orchestra competition is designed to raise awareness about “the growing capacity and applications of embedded computer systems,” says NICTA. The Robo-Clarinet won first prize with with a torrid rendition of “The Flight of the Bumblebee” and “Bolero.” Second prize at the event went to the Dutch teamDARE (Daring Autonomous Robots Eindhoven), which developed a guitar-picking robot. Third prize went to a piano-playing machine from HAMK University in Finland.
At presstime, it was unclear whether the HAMK team used Linux, as it has in the past. The teamDARE guitar used Windows, according to Project Leader Frank van Heesh, who said, “Our previous robots ran Linux (with great reliability), but for this one we used Windows because our vision functions were written and optimized for the Directshow framework. The vision routines detect a conductor's baton so one can control the playback speed.”
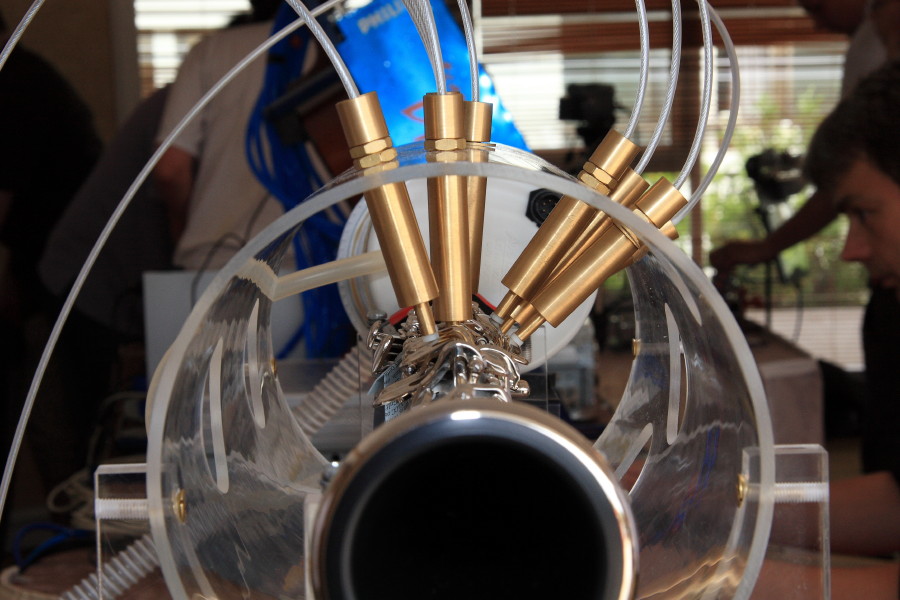
Robo-Clarinet
(Click to enlarge)
The NICTA/UNSW development team was led by John Judge, a senior research engineer at NICTA, who described the clarinet robot in a statement as “an embedded computer system connected via specially constructed electronics to actuators that control the keys and mouthpiece of the clarinet.” Judge added, “The robotic mouth uses two tiny motors: one applies force to the clarinet's reed, emulating the action of the human lip, while the other mimics the action of the human tongue.” Force is applied to the keys by brass plungers, which are fitted with either rubber or nylon feet, depending on the key.
Robo-Clarinet and its creators (left to right): Jean Geoffroy,
Joe Wolfe, Mark Sheahan, John Judge
The clarinet robot runs off of two tiny Gumstix boards, one of which is the ARM PXA270-based Verdex board, clocked at 600MHz. The other Gumstix board is the Robostix, which is based on an Atmel ATmega128 AVR microcontroller. The two modules are sold together as a $323 “Robotics WiFi Pack” along with a NetWifi microSD card and other components (see image below at right). However, the NICTA/UNSW team bought the components separately, along with a “consoleLCD-vx” device with a 4.3-inch Samsung LCD screen.
 Gumstix Robotics WiFi Pack with Verdex and Robostix boards |
The Verdex board processes the music and coordinates the transmission of appropriate MIDI events to the Robostix, which then controls mouthpiece and keypad actions, explained Mark Sheahan of the UNSW team, in an email. The clarinet robot is an entirely embedded system, working without an attached PC. Human operators can interact with the device via a USB-attached keyboard, LCD screen, and LEDs.
“One of the UART headers on the consoleLCD-vx was used to communicate with a Robostix, which had headers that were connected to purpose-build PCBs,” said Sheahan, a UNSW computer science and engineering student.
In developing the clarinet, the NICTA/UNSW team used OpenEmbedded, an automated build environment available with Gumstix bitbake recipes for several months now.
“The Gumstix Verdex ran the normal Gumstix OpenEmbedded release, which uses the Angstrom Linux distribution,” said Sheahan. “One of the rules of the contest was parsing lilypond files, so we had Debian Armel Lenny installed on the microSD card. Yes, a whole distro just for one program! it was the fastest, cleanest way.”
OpenEmbedded is aimed at providing a metadata repository of everything needed to cross-compile embedded filesystem images from scratch, including toolchains, sourcecode, XML-based “recipe” files, and automated “bitbake” make scripts. The environment evolved from tools created by developers targeting the Linux-based Sharp Zaurus PDA, and has been used by several high-profile Linux development projects, including the Poky Linux mobile distribution and the OpenMoko open source Linux distribution for mobile phones.
 Second-place winning teamDARE guitar robot (Click to enlarge) |
According to Judge, the fine-tuned control of the reed and air pressure flow was developed with the help of Joe Wolfe of UNSW's Music Acoustics Laboratory. Stated Wolfe, “As any human clarinetist will tell you, avoiding squeaks is an important challenge. To play over a large pitch range, softly or loudly, the robot had to know how to control air pressure and the force and damping on the reed.”
Music Acoustics Lab researchers plan to use the robot to investigate the gestures of human clarinet players. As a result of this research, the group expects to develop a more musically savvy version for next year's competition. Stated Wolfe, “For us, the robot is a complementary part of our research into how to play music badly or well, and what makes the difference.”
 Third-place winning HAMK piano robot (Click to enlarge) |
NICTA is known in the Linux community for having spun off “Open Kernel Labs” (OK Labs) last year. The Chicago-based spin-out is shipping a commercially supported, BSD-licensed “OKL4” microkernel that runs Linux and other guest OSes in user space, targeting devices such as mobile phones. In 2005, NICTA developed an open source “L4” embedded microkernel and real-time “Iguana OS” operating system designed to provide a virtual machine environment for Linux. NICTA supplied the L4/Iguana technology to QualComm, and Toshiba is said to have used the stack in its W47T phone.
Other members of the robot development team included NICTA Senior Research Engineer, Peter Chubb, and Kim Son Dang and Dr. Jay Katupitiya from UNSW's Mechanical & Manufacturing Engineering School. Meanwhile, Jean Geoffroy, Paul Santus, and John Smith assisted Wolfe from the UNSW's School of Physics.
Stated Artemisia President Dr Yrjo Nuevo, speaking of the Robo-Clarinet, “The jury placed it as the overall winner due to its playing ability and the complexity of its mouthpiece design.”
Robo-Clarinet YouTube video
(Click for details)
More information on the Robo-Clarinet can be found at this UNSW page.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.