“BeagleBot” cruises on Linux
Jan 14, 2009 — by Eric Brown — from the LinuxDevices Archive — 2 views A Linux-powered robot project has won the first monthly design contest sponsored by “BeagleBoard.org,” a group promoting a low-cost, Linux-friendly single board computer (SBC) with an ARM Cortex-A8-based processor. Antti Seppanen's “BeagleBot” is a partially autonomous, WiFi-enabled robot with servos, sensor, and webcam.
A Linux-powered robot project has won the first monthly design contest sponsored by “BeagleBoard.org,” a group promoting a low-cost, Linux-friendly single board computer (SBC) with an ARM Cortex-A8-based processor. Antti Seppanen's “BeagleBot” is a partially autonomous, WiFi-enabled robot with servos, sensor, and webcam.
(Click for larger view of the BeagleBot)
 Antti Seppanen |
Beagleboard.org was formed by a small group of TI employees who developed the Beagle Board. The group plans to make monthly announcements of the best Beagle Board-based projects. The first winner is the BeagleBot, from Finland's Seppanen, who is posting his Linux code under GPLv2, and is releasing schematics and other design files under a Creative Commons license.
The BeagleBot project combines the Beagle Board with a home-made expansion board, plus a drive system, servo system, distance sensor, a USB hub, webcam, and WiFi radio, all mounted on a wheeled chassis. The 2mph speedster runs on motorcycle batteries, and even includes speakers for simulating a motorcycle engine.
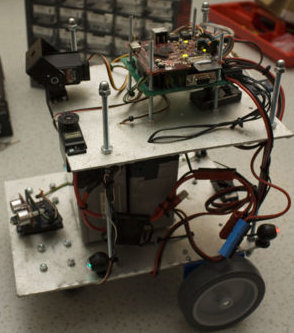
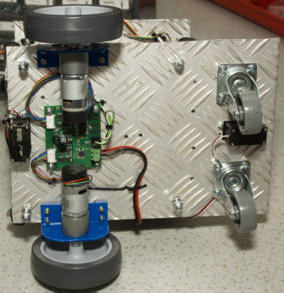
Two views of the BeagleBot. Writes Seppanen: “It certainly isn't any beauty, but who cares?”
(Click on either to enlarge)
Here's a closer look at each of the major BeagleBot components:
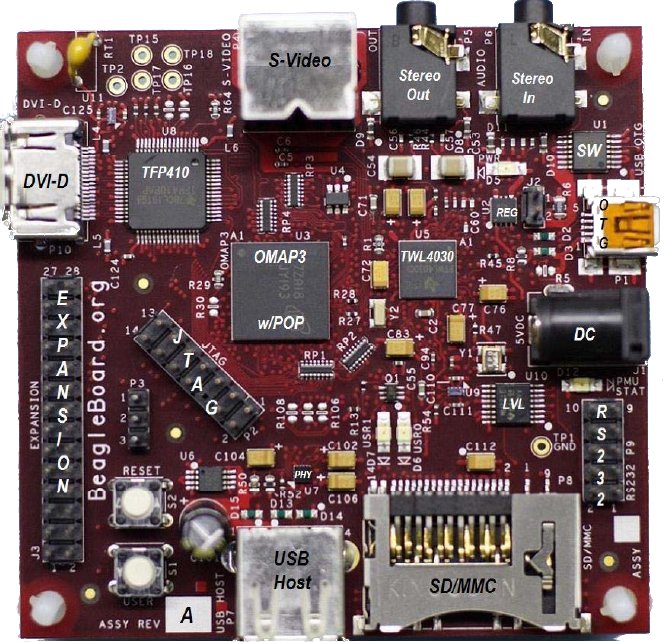
- Beagle Board — The Beagle Board, which shipped last July, is based on TI's OMAP3530 processor, the fanciest of TI's OMAP35xx portfolio, and one of the first available SoCs based on ARM's Cortex-A8 processor core. Based in turn on a super-scaler, “dual-issue” micro-architecture, the Cortex-A8 core can double performance over similarly clocked SoCs that used earlier ARM architecture. Along with a 600MHz Cortex-A8 core, the OMAP3530 integrates TI's TMS320C64x core, a high-end DSP (digital signal processor) clocked at 430MHz. Onboard 2D/3D graphics are supplied by an Imagination SGX 2D/3D graphics processor supporting dual independent displays.


Beagle Board, top and bottom
(Click either view to enlarge) - Expansion board — The expansion board, which, according to Seppanen's BeagleBot web page, is still being fine-tuned, offers a +5-Volt power supply with wide input voltage range up to at least +15 Volts. It also incorporates an ATMega16 controller. Other features are said to include:
- Level shifters and pin headers for +5 volt tolerant I2C, SPI, and GPIOs
- 5 pcs of 50 Hz PWM output for normal RC servos
- RS232 header(s)
- Open-drain outputs for various peripherals
- Control of servos and open-drain outputs from Beagle via I2C
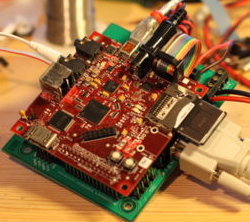
Expansion board with Beagle Board mounted - Drive system — The BeagleBot uses an RD01 drive system from Robot Electronics. The RD01 includes control electronics, a pair of motors, wheels, and mounting brackets. The RD01 requires only “a few amps of 12 volts” and an I2C interface for control and for performing tasks such as reading battery voltage, says Seppanen. The 170-RPM motors and 100mm wheels can achieve a maximum speed of about 0.9 m/s or about 3km/h (2mph), says the developer. Speed can be controlled in 128 steps, in both reverse and forward, and the motors are equipped with encoders used to read RPM.


RD01 drive system (left); servo system (right) - Servo system — This standard set of five RC servos offer 50Hz PWM control via the ATMega16 controller on the expansion board. User-space applications running on the Beagle Board can control the servos via an I2C message. The servo system is mounted on a special two-axis bracket system, and power is provided by the BeagleBot's batteries.

SRF08 distance sensor - Distance sensor — The BeagleBot incorporates a Robot Electronics SRF08 ultrasonic ranger with I2C bus to measure ranges from between three centimeters and six meters, says Seppanen. With its 55-degree (-6 dB points) beam width, it can cover over 180 degrees.
- USB hub, webcam, WiFi — The BeagleBot incorporates a D-Link 4-port active USB hub, which links up a Labtec USB Webcam, and a ZD1211-based A-Link WL54USB WiFi device. Power to the USB hub comes from the expansion board.
- Mechanics, power, and chassis — The device runs on dual 6-Volt Biltema motorcycle batteries, says Seppanen. The chassis is made of two aluminum plate shelves and threaded rod, and an extra pair of wheels are added on the bottom in addition to the two servo drive system wheels for stability. The four-wheeler is also mounted with Nokia speakers (Vroom! Vroom!)
- Software — The BeagleBot's embedded code has been upgraded to Linux kernel 2.6.27. The code includes kernel image and sources (from OpenEmbedded), as well as X-Loader and U-Boot.bin, both with sources. The software also includes a few patches. The BeagleBot comes with some PC control software, which is currently available for Windows XP, but is compilable to Linux and Mac PCs, says Seppanen.

Availability
Although the BeagleBot is still being fine-tuned, especially in terms of audio, Seppanen has posted code and schematics for free download under open source licenses, and has also posted several videos. More information may be found here.
More on the Beagle Board design contest may be found at Beagleboard.org, here.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.