Linux-based flying robots use swarm AI for rescue ops
Sep 29, 2010 — by Eric Brown — from the LinuxDevices Archive — 24 viewsSwiss university EPFL has demonstrated a swarm of Linux-based semi-autonomous “Flying Robots” designed for rescue communications. Each winged drone in the “SMAVNET” project is equipped with a Toradex Colibri PXA270 module, plus Wi-Fi, ZigBee, and GPS wireless communications, used to log location and trajectory and communicate with both ground communications and other craft.
The Ecole Polytechnique Federale de Lausanne (EPFL) project, called Swarming Micro Air Vehicle Network (SMAVNET), aims to deploy swarms of flying craft that can be deployed in disaster areas to quickly create communication networks. The Flying Robots are designed for safety, as well as low cost and weight, says EPFL. Equipped with human-swarm interfaces, the robots are said to be operable by non-experts.

Launching the Flying Robots
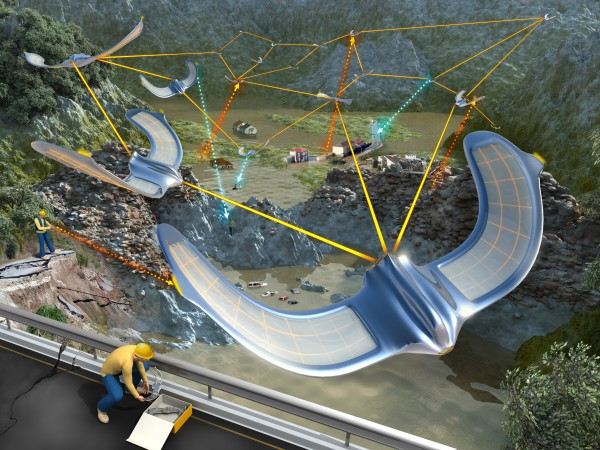
Illustration of SMAVNET communications
(Click to enlarge)
The swarm network is somewhat similar to wireless, ground-based mesh networks, except that in this case, the nodes are mobile, and are imbued with swarm algorithms that help them adapt to changing situations (see farther below).

So far, SMAVNET has been able to deploy swarms of up to 10 robots
(Click to enlarge)

The Flying Robots are controlled by a Toradex Colibri module running Linux.
(Click to enlarge)
Each robot runs Linux on a Toradex Colibri PXA270 module, the first of many tiny Colibri modules to ship over the last five years, including Toradex' most recent model, the Nvidia Tegra 2-based, 1GHz Colibri Tegra T20. As the name implies, the Toradex Colibri PXA270 runs on Marvell's ARM/XScale PXA270 processor, which is typically clocked to 520MHz.
The robots are further equipped with an autopilot for the control of altitude, airspeed, and turn rate. The autopilot is said to integrate a micro-controller that runs a "minimalist control strategy" based on input from a gyroscope and two pressure sensors.

Ground station SMAVNET
Each robot is further equipped with a GPS module (U-blox LEA-5H) and a ZigBee (XBee Pro) transmitter, which together are used to log flight trajectories. In this case, ZigBee appears to be used for on-device communications.
As the video farther below shows, the project has demonstrated swarm behavior with 10 Flying Robots, which is said to likely be a new record for outdoors flight. For fast deployment of large swarms, input from the swarm operator must be reduced to a minimum during robot calibration, testing and all phases of flight says the project. To achieve, this "robot reliability, safety and autonomy must be pushed to a maximum," say the researchers.
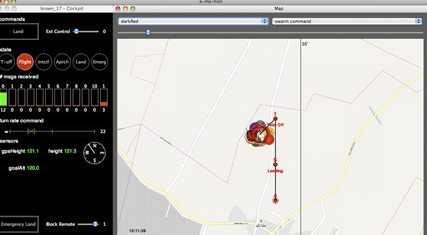
PC-based ground control application
Swarm mentality
Initially, the SMAVNET project is intended as a platform for testing out swarm algorithms, with a special emphasis on rescue. As with many other swarm algorithm research projects, the SMAVNET approach "turns to biology for inspiration."
The SMAVNET project is working on two main development paths, one based on artificial evolution, while the other mimics ant behavior. The first approach uses artificial evolution software to discover "simple and unthought-of robot controllers," says the project. These controllers are then reverse-engineered to demonstrate behaviors such as exploration, synchronization, area coverage, and communication relay.
The second approach is inspired by ants and their pheromone paths. Ants establish and read these scent paths to optimally deploy and search for food. This behavior is said to be analogous to the deployment and maintenance of communication pathways between rescuers.
Flying Robots in action on YouTube
Source: EPFL
(Click to play)
Further information
More information on the SMAVNET project may be found at this project site, here. The story was first reported by Make, found here.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.