Linux robots swarm onto lab floor
Dec 8, 2006 — by LinuxDevices Staff — from the LinuxDevices Archive — 8 views Swiss robot vendor K-Team is shipping a third-generation model in its flagship “Khepera” line. The Khepera III, which runs Linux on an optional ARM-powered add-in card, adds floor-roving capabilities, the better to support experiments in swarm behavior, K-Team says.
Swiss robot vendor K-Team is shipping a third-generation model in its flagship “Khepera” line. The Khepera III, which runs Linux on an optional ARM-powered add-in card, adds floor-roving capabilities, the better to support experiments in swarm behavior, K-Team says.
(Click for larger view of the Khepera III)
digg this story |
Other suggested uses for the Khepera III include experiments in navigation, multi-agent systems, control, collective behavior, real-time programming, and advanced electronics demonstrations.
 |
K-Team's Khepera robots are available as simple “base” units that can be controlled remotely using a PC. The Khepera III's base unit features a near-field object detection array based on nine infrared sensors, and a long-distance object detection array based on five ultrasonic sensors. Additionally, two ground-facing infrared sensors can be added, for tabletop edge detection and/or line following capabilities. The photo on the right shows the Khepera's IR (bottom) and ultrasonic (top) sensors.
 |
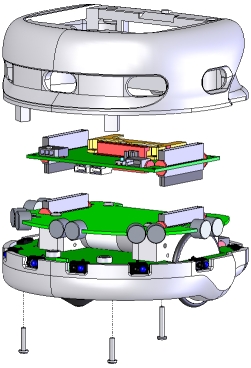
The Khepera base units can be enhanced with the addition of K-Team's ARM-based KoreBot boards, shown installed, in the photo on the left. The KoreBot board is based on a 400MHz PXA255 processor, and has 64MB of RAM and 32MB of flash. It runs a distribution derived from Familiar Linux.
Exploded view of Khepera III, showing its sensor and motion control boards, and its Linux-based KoreBot board
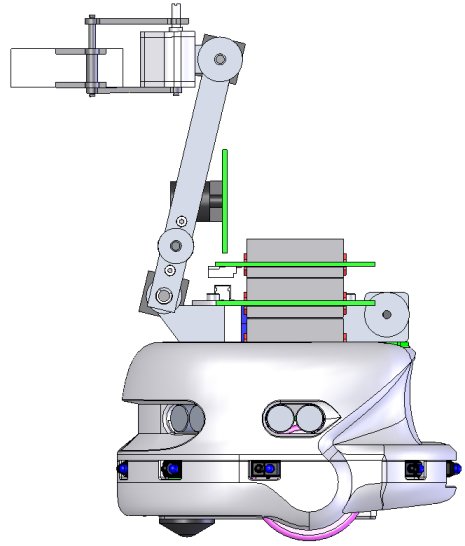 KoreBot Gripper/USB cam (Click to enlarge) |
The KoreBot boards feature a “KB-250” expansion interface that exposes a variety of buses and interfaces through surface-mount connectors. The connectors can be used to stack additional peripheral modules onto the robot. Modules are available that add CompactFlash storage, WiFi and/or Bluetooth radios, audio I/O, and so on. The drawing at left depicts a Khepera with gripper arm and USB camera modules.
The KoreBot's Linux environment includes a GCC-based cross-compiler said to support complex code compilation and conditional builds. Also available is an open source KControl (Khepera Control) library that provides a C/C++ API to the robot's control system, and a commercial WEBOTS 3D simulation environment. Combined, these tools and libraries simplify writing or porting applications that enable the Khepera to operate autonomously, K-Team says.
Compared with earlier Khepera models, the Khepera III's most significant new feature appears to be the ability to operate on lab floors in addition to table tops. This will facilitate its use in experiments involving swarming behavior, K-Team says.
Other touted Khepera features include:
- Long- and short-range sensor arrays
- Swapable battery pack system
- “Exceptional differential odometry”
- Swiss-made, brushed, DC robot motor blocks provide “roughly 22 pulses per mm of robot motion”
- Standard GNU/Linux environment allows “almost any exisiting library” to be ported
- KoreBot GNU C/C++ cross-compiler supports “all the standard C library functions and almost all the other POSIX libraries”
Availability
The Khepera III is available now, priced at about $1,300 for a base unit.
Also available is a video depicting several Khepera IIIs precisely negotiating a simple table-top maze without bumping into one another.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.