Open source robot runs on an Atom, does flips
Dec 15, 2010 — by Eric Brown — from the LinuxDevices Archive — 7 viewsRobotis is shipping an 18-inch, humanoid robot developed as an open source research platform by Virginia Tech's Robotics & Mechanisms Laboratory (RoMeLa). The Linux-ready Darwin-OP can walk, kick a ball, and pick itself up after falling over — thanks to an Intel Atom-based FitPC2i SBC (single board computer), an ARM Cortex-M3 based management controller, 20 actuators, and audio/video sensors.
The Darwin-OP (Dynamic Anthropomorpic Robot with Intelligence, Open Platform) robot is the latest of a series of robots developed by Virginia Tech's Robotics & Mechanisms Laboratory (RoMeLa) since 2004. Aimed at research labs and universities doing robotics research, the robot has been released as a fully open source hardware and software platform.
PC-based development software is available on Linux and Windows, and programming can be done with a variety of tools including C++, Python, LabVIEW, and MATLAB, says RoMeLa.

Darwin-OP
(Click to enlarge)
This latest Darwin was introduced at IEEE's Humanoids 2010 conference last week, held in Nashville, Tenn. Earlier Darwin robots apparently have appeared in RoboCup competitions, although they managed to elude our previous coverage of the RoboCup events.
Darwin-OP is said to have been developed by RoMeLa with the help of National Science Foundation funding, as well as collaborative input from Purdue University and the University of Pennsylvania's General Robotics, Automation, Sensing and Perception (GRASP) laboratory. The RoMeLa team is led by Professor Dennis Hong, who can be seen in a YouTube video below urging on Darwin-OP as the robot claps his hands, kicks a ball, and performs a flip movement to pick itself up again after being knocked over.

Darwin-OP details
(Click to enlarge)
The FitPC2i SBC, which includes a 4GB solid state drive (SSD), is similar to the mainboard for the Linux and Windows-ready FitPC2 MiniPC we covered in June. (CompuLab also sells a similar FitPC2 SBC — no "i" — that lacks the 4GB SSD.)
The FitPC2i SBC (below) offers up to 2GB DDR2 RAM, mini-SD slot, DVI & LVDS display interfaces, dual Ethernet ports, six USB 2.0 ports, a serial port, and 802.11n Wi-Fi, says CompuLab. The 4.1 x 3.8 x 0.9-inch (104 x 96 x 23 mm) board is said to run on five Watts.

CompuLab's FitPC2i SBC
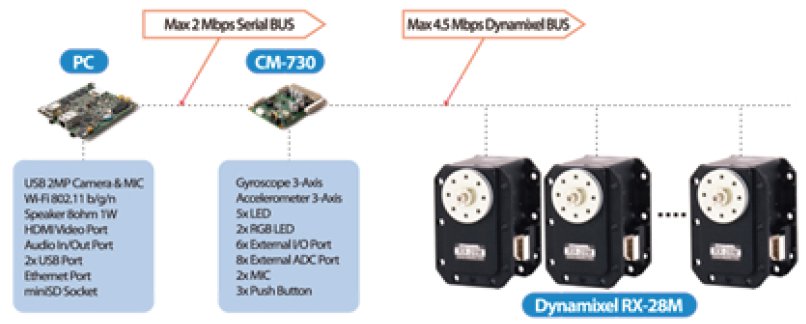
Major architectural components of Darwin-OP
(Click to enlarge)
Like some other humanoids, the Darwin-OP likes to fudge his height a bit: Although billed as an 18-inch robot, he actually only makes it to 17.9 inches (455mm), according to the specs, and weighs 6.3 pounds (2.8 kilograms).

Darwin-OP's head with USB cameras and microphones
The Darwin-OP's mouth is actually a speaker built into his torso, which also includes a three-axis gyroscope and three-axis accelerometer. The torso is also where you'll find the SBC and I/O, including the mini-SD slot. Wi-Fi radio, dual USB ports, HDMI port, audio I/O, and Ethernet port. The torso also houses a 30-minute battery, an external power input and switch, status LEDs, two cooling fans, and a removable handle.

Darwin-OP in action
(Click to enlarge)
The Darwin-OP is designed to walk at a rate of 24.0 cm/sec (9.5 in/sec) with 0.25 sec/step and a user-modifiable gait. As shown in the video below, the robot can launch himself up into standing mode in 2.8 seconds from facing the floor, and in 3.9 seconds from facing up, says Robotis.
DARwin-OP demo on YouTube
Source: IEEE Spectrum
(Click to play)
The Darwin-OP is available from Robotis for $9,600 with an education discount and $12,000 for others, fully assembled, but early models appear to be spoken for by Robotis and RoMeLa partner universities. The Robotis software and schematics are available for free open load download at this Robotis Darwin-OP page, as well as at this Sourceforge.net page.
More information may also be found in this Sourceforge.net PDF spec sheet, as well as at Virginia Tech's RoMeLa site. The IEEE Spectrum story may be found here.
This article was originally published on LinuxDevices.com and has been donated to the open source community by QuinStreet Inc. Please visit LinuxToday.com for up-to-date news and articles about Linux and open source.